Automotive
Automotive Batérie
Batérie Bioprocesy a bioreaktory
Bioprocesy a bioreaktory Čisté priestory
Čisté priestory Dátové centrá
Dátové centrá Drevárstvo a papierenstvo
Drevárstvo a papierenstvo Energetika
Energetika Farmácia a medicína
Farmácia a medicína Hutníctvo a horníctvo
Hutníctvo a horníctvo HVAC a kvalita vnútorného vzduchu
HVAC a kvalita vnútorného vzduchu Chémia a petrochémia
Chémia a petrochémia Obnoviteľné zdroje
Obnoviteľné zdroje Palivové články
Palivové články Polohovanie a robotika
Polohovanie a robotika Polovodiče
Polovodiče Potravinárstvo a nápoje
Potravinárstvo a nápoje Skladovanie
Skladovanie Sklárstvo
Sklárstvo Strojárstvo
Strojárstvo Doprava a logistika
Doprava a logistika Veda a výskum
Veda a výskum Vodík
Vodík Vodné hospodárstvo
Vodné hospodárstvo Poľnohospodárstvo
Poľnohospodárstvo Životné prostredie
Životné prostredie ADARO
ADARO
 Alco Valves Group
Alco Valves Group
 Crystal Pressure
Crystal Pressure
 AP Tech
AP Tech
 BEKA associates
BEKA associates
 Bronkhorst
Bronkhorst
 CPC
CPC
 Eaton-Azonix
Eaton-Azonix
 Eaton-Gecma
Eaton-Gecma
 Eaton-MEDC
Eaton-MEDC
 Eaton-MTL
Eaton-MTL
 EKO Instruments
EKO Instruments
 Expo
Expo
 Ham-Let (UCT)
Ham-Let (UCT)
 HIMA
HIMA
 KSR Kuebler
KSR Kuebler
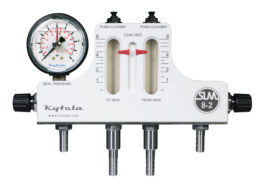
 Kytola
Kytola
 Mott Corporation
Mott Corporation
 Multi Instruments
Multi Instruments
 Muetec
Muetec
 TecSense
TecSense
 Valex
Valex
 Systec Controls
Systec Controls


Absolutní enkodéry WDGA (PROFINET-IO, EtherCAT, EtherNet/IP a Universal-IE) Absolute encoders WDGA with PROFINET-IO, EtherCAT, EtherNet/IP and Universal-IE interface



Absolutní magnetické snímače WDGA s komunikačními protokoly PROFINET, EtherCAT, EtherNet/IP a Universal-IE

Krajina pôvodu
Wachendorff Automation špecialisti
 Otáčky: až 8 000 rpm
Otáčky: až 8 000 rpm 16/43-bit jedno/víceotačkový
16/43-bit jedno/víceotačkový Výstup: PN, EtherCAT, EtherNet a Universal-IE
Výstup: PN, EtherCAT, EtherNet a Universal-IE Teplota: -40 °C až +85 °C
Teplota: -40 °C až +85 °C Krytí: IP65, IP67
Krytí: IP65, IP67 Bez baterie
Bez baterie
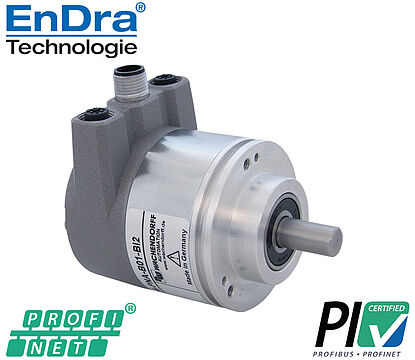
Snímače/enkodéry série WDGA s komunikačními protokoly PROFINET-IO, EtherCAT, EtherNet/IP a Universal-IE
Absolutní enkodéry WDGA jsou rotační snímače polohy a otáček, které poskytují okamžitou informaci o aktuální stavu. Díky patentované technologii EnDra® se tato informace neztratí ani po výpadku napájení, není zde použita ani záložní baterie. Pracují na magnetickém principu a dělí se na jednootáčkové a víceotáčkové.
PROFINET-IO, EtherCAT a EtherNet/IP jsou komunikační sběrnice pro řídící systémy v oblasti průmyslové automatizace. Nejvíce se uplatňují u jednoduchých distribuovaných zařízení pro real-time komunikaci typu Master-Slave s řídicími systémy. Enkodéry WDGA mohou být vybaveny také univerzálním Industrial Ethernetem, kde si zákazník může volit výše uvedené komunikační protokoly jednoduchým nahráním příslušného firmware.
Enkodéry WDGA lze dodat i s jinými komunikačními protokoly jako jsou CANopen, CANopen LIFT, SAE J1939, IO-Link, SSI, RS48, PROFIBUS-DP.

Enkodér WDGA 58A PROFINET-IO (cov)
Absolutní hřídelový snímač, magnetický
Pouzdro: Ø 58 mm
Hřídel: Ø 6 mm, Ø 8 mm, Ø 10 mm, Ø 3/8″
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: PROFINET-IO (CC-C)
Profil zařízení: přepínatelný, třída 3, 4
Enkodér WDGA 58B PROFINET-IO (cov)
Absolutní hřídelový snímač, magnetický
Pouzdro: Ø 58 mm
Hřídel: Ø 6 mm, Ø 8 mm, Ø 10 mm, Ø 3/8″
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: PROFINET-IO (CC-C)
Profil zařízení: přepínatelný, třída 3, 4

Enkodér WDGA 58D PROFINET-IO (cov)
Absolutní hřídelový snímač, magnetický, pro velká zatížení
Pouzdro: Ø 58 mm
Hřídel: Ø 12 mm
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: PROFINET-IO (CC-C)
Profil zařízení: přepínatelný, třída 3, 4
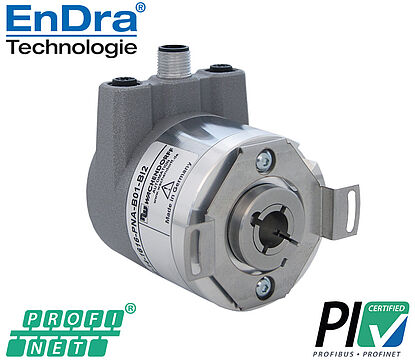
Enkodér WDGA 58E PROFINET-IO (cov)
Absolutní snímač s dutou hřídelí (neprůchozí otvor), magnetický
Pouzdro: Ø 58 mm
Vrtání (neprůchozí): Ø 12, 14, 15 mm;
s adaptérem Ø 6, 6.35 (1/4″), 7, 8, 9.525 (3/8″), 10 mm
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: PROFINET-IO (CC-C)
Profil zařízení: přepínatelný, třída 3, 4

Enkodér WDGA 58F PROFINET-IO (cov)
Absolutní hřídelový snímač, magnetický
Nejkompaktnější PROFINET enkodér na světě!
Pouzdro: Ø 58 mm
Hřídel: Ø 6 mm, Ø 8 mm, Ø 10 mm, Ø 3/8″
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: PROFINET-IO (CC-C)
Profil zařízení: přepínatelný, třída 3, 4

Enkodér WDGA 58A EtherNet/IP
Absolutní hřídelový snímač, magnetický
Pouzdro: Ø 58 mm
Hřídel: Ø 6 mm, Ø 8 mm, Ø 10 mm, Ø 3/8″
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: EtherNet™
Klasifikace zařízení: Snímač polohy se zapojením do kruhu DLR (Device Level Ring)

Enkodér WDGA 58B EtherNet/IP
Absolutní hřídelový snímač, magnetický
Pouzdro: Ø 58 mm
Hřídel: Ø 6 mm, Ø 8 mm, Ø 10 mm, Ø 3/8″
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: EtherNet™
Klasifikace zařízení: Snímač polohy se zapojením do kruhu DLR (Device Level Ring)

Enkodér WDGA 58D EtherNet/IP
Absolutní hřídelový snímač, magnetický, pro velká zatížení
Pouzdro: Ø 58 mm
Hřídel: Ø 12 mm
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: EtherNet™
Klasifikace zařízení: Snímač polohy se zapojením do kruhu DLR (Device Level Ring)

Enkodér WDGA 58E EtherNet/IP
Absolutní snímač s dutou hřídelí (neprůchozí otvor), magnetický
Pouzdro: Ø 58 mm
Vrtání (neprůchozí): Ø 12, 14, 15 mm;
s adaptérem Ø 6, 6.35 (1/4″), 7, 8, 9.525 (3/8″), 10 mm
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: EtherNet™
Klasifikace zařízení: Snímač polohy se zapojením do kruhu DLR (Device Level Ring)

Enkodér WDGA 58F EtherNet/IP
Absolutní hřídelový snímač, magnetický
Nejkompaktnější EtherNet/IP enkodér na světě!
Pouzdro: Ø 58 mm
Hřídel: Ø 6 mm, Ø 8 mm, Ø 10 mm, Ø 3/8″
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: EtherNet™
Klasifikace zařízení: Snímač polohy se zapojením do kruhu DLR (Device Level Ring)

Enkodér WDGA 58A EtherCAT (cov)
Absolutní hřídelový snímač, magnetický
Pouzdro: Ø 58 mm
Hřídel: Ø 6 mm, Ø 8 mm, Ø 10 mm, Ø 3/8″
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: EtherCAT
Profil zařízení: CiA DS-406 V4.0.2, třída 3

Enkodér WDGA 58B EtherCAT (cov)
Absolutní hřídelový snímač, magnetický
Pouzdro: Ø 58 mm
Hřídel: Ø 6 mm, Ø 8 mm, Ø 10 mm, Ø 3/8″
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: EtherCAT
Profil zařízení: CiA DS-406 V4.0.2, třída 3

Enkodér WDGA 58D EtherCAT (cov)
Absolutní hřídelový snímač, magnetický, pro velká zatížení
Pouzdro: Ø 58 mm
Hřídel: Ø 12 mm
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: EtherCAT
Profil zařízení: CiA DS-406 V4.0.2, třída 3

Enkodér WDGA 58E EtherCAT (cov)
Absolutní snímač s dutou hřídelí (neprůchozí otvor), magnetický
Pouzdro: Ø 58 mm
Vrtání (neprůchozí): Ø 12, 14, 15 mm;
s adaptérem Ø 6, 6.35 (1/4″), 7, 8, 9.525 (3/8″), 10 mm
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: EtherCAT
Profil zařízení: CiA DS-406 V4.0.2, třída 3

Enkodér WDGA 58F EtherCAT (cov)
Absolutní hřídelový snímač, magnetický
Nejkompaktnější EtherCAT enkodér na světě!
Pouzdro: Ø 58 mm
Hřídel: Ø 6 mm, Ø 8 mm, Ø 10 mm, Ø 3/8″
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: EtherCAT
Profil zařízení: CiA DS-406 V4.0.2, třída 3

Enkodér WDGA 58A Universal IE (cov)
Absolutní hřídelový snímač, magnetický
Pouzdro: Ø 58 mm
Hřídel: Ø 6 mm, Ø 8 mm, Ø 10 mm, Ø 3/8″
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: volitelný (PROFINET-IO, EtherCAT, EtherNet/IP)

Enkodér WDGA 58B Universal IE (cov)
Absolutní hřídelový snímač, magnetický
Pouzdro: Ø 58 mm
Hřídel: Ø 6 mm, Ø 8 mm, Ø 10 mm, Ø 3/8″
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: volitelný (PROFINET-IO, EtherCAT, EtherNet/IP)

Enkodér WDGA 58D Universal IE (cov)
Absolutní hřídelový snímač, magnetický, pro velká zatížení
Pouzdro: Ø 58 mm
Hřídel: Ø 12 mm
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: volitelný (PROFINET-IO, EtherCAT, EtherNet/IP)

Enkodér WDGA 58E Universal IE (cov)
Absolutní snímač s dutou hřídelí (neprůchozí otvor), magnetický
Pouzdro: Ø 58 mm
Vrtání (neprůchozí): Ø 12, 14, 15 mm;
s adaptérem Ø 6, 6.35 (1/4″), 7, 8, 9.525 (3/8″), 10 mm
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: volitelný (PROFINET-IO, EtherCAT, EtherNet/IP)

Enkodér WDGA 58F Universal IE (cov)
Absolutní hřídelový snímač, magnetický
Nejkompaktnější Universal IE enkodér na světě!
Pouzdro: Ø 58 mm
Hřídel: Ø 6 mm, Ø 8 mm, Ø 10 mm, Ø 3/8″
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: volitelný (PROFINET-IO, EtherCAT, EtherNet/IP)
Příslušenství enkodérů Wachendorff









 Absolutní enkodéry WDGA s technologií EnDra®
Absolutní enkodéry WDGA s technologií EnDra®

 Absolutní enkodéry WDGA s protokolem CANopen
Absolutní enkodéry WDGA s protokolem CANopen
 Absolutní enkodéry WDGA s protokolem CANopen LIFT
Absolutní enkodéry WDGA s protokolem CANopen LIFT
 Absolutní enkodéry WDGA s protokolem SSI
Absolutní enkodéry WDGA s protokolem SSI
 Absolutní enkodéry WDGA s protokolem PROFIBUS
Absolutní enkodéry WDGA s protokolem PROFIBUS
 Absolutní enkodéry WDGA s protokolem PROFINET
Absolutní enkodéry WDGA s protokolem PROFINET
 Absolutní enkodéry WDGA s protokolem EtherNet/IP
Absolutní enkodéry WDGA s protokolem EtherNet/IP
 Absolutní enkodéry WDGA s protokolem EtherCAT
Absolutní enkodéry WDGA s protokolem EtherCAT
 Absolutní enkodéry WDGA s protokolem Universal IE
Absolutní enkodéry WDGA s protokolem Universal IE
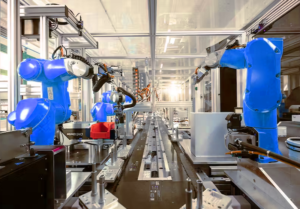
Meranie rýchlosti a polohy pohybu u priemyselných robotov
V priemyselných aplikáciách, ako je napríklad obrábanie kovov alebo montážne linky, je kľúčové mať roboty, ktorí môžu pohybovať obrobky rýchlo a presne, čo zvyšuje celkovú efektivitu výrobného procesu. Enkodéry umožňujú robotom dosiahnuť optimálne trajektórie pohybu a minimalizujú chyby, čo je zásadné pre dosiahnutie kvalitných výsledkov v priemyselnej výrobe.

Nepretržitá automatizácia vrtných súprav
Enkodéry sú neoddeliteľnou súčasťou moderných vrtných súprav a zohrávajú zásadnú úlohu pri zvyšovaní efektivity, presnosti a bezpečnosti vŕtania. Uplatňujú sa predovšetkým absolútne enkódery s magnetickým princípom snímania, ktoré hravo konkuruje presnosti optických enkóderov a zároveň dávajú skvelú alternatívu pre aplikácie so silnými mechanickými vibráciami a najrôznejším robustným zariadením.

Koordinácia pohybu plniacich a stáčacích liniek
Automatické plniace a stáčacie linky sú nepostrádateľnou súčasťou nápojového a potravinárskeho priemyslu, kde presnosť a spoľahlivosť hrajú kľúčovú úlohu. Tieto linky sú navrhnuté na plnenie obalov, a enkódery sú tu dôležitým prvkom, ktorý umožňuje týmto strojom pracovať vysoko efektívne.

Riadenie uhla natočenia lopatiek a nastavenie azimutu u veterných elektrární
Využívanie obnoviteľných zdrojov energie, ako je veterná energia, je nevyhnutné pre ochranu klímy a životného prostredia. Využívanie veterných turbín na pevnine aj na mori je v posledných rokoch čoraz dôležitejšie. Dôležitým faktorom pri dosahovaní čo najvyššieho energetického výkonu je vysoká účinnosť elektrární. V tejto súvislosti sú ich kľúčovým prvkom presné snímače, ktoré pomáhajú optimalizovať výkon a znižovať náklady na údržbu.

Simulácia namáhania automobilových bŕzd
Brzdy automobilu sú jedným z kľúčových prvkov vozidla, ktoré zabezpečujú bezpečnosť vodiča a ostatných účastníkov cestnej premávky. Je dôležité, aby boli brzdy spoľahlivé a poskytovali dostatočný brzdný účinok v rôznych situáciách a podmienkach. Preto sa na vývoj a testovanie nových typov bŕzd používajú rôzne metódy na simuláciu namáhania bŕzd v rôznych podmienkach. Jednou z metód simulácie namáhania bŕzd je takzvaná dynamická simulácia, pri ktorej sa používa špeciálne skúšobné zariadenie na simuláciu jazdy vozidla v rôznych podmienkach.
Aplikácie súvisiace s výrobcom Wachendorff Automation

Meranie prejdenej vzdialenosti autonómnych vozíkov
Prvý autonómny vozík (AGV) bol vyvinutý v 80. rokoch 20. storočia. Bez senzorovej technológie by to nebolo možné. Vďaka neustálemu vývoju senzorov sa do závodov zavádza čoraz viac AGV, čím sa zvyšuje efektívnosť skladu a bezpečnosť na pracovisku. Senzory sú naprogramované podľa vonkajších podmienok a prenášajú údaje do hlavného riadiaceho modulu AGV, čo umožňuje autonómnemu vozíku pohybovať sa po pracovisku a vykonávať určené úlohy bez zásahu človeka.

Ovládanie otočných a teleskopických ramien
Jedným zo spôsobov, ako zabezpečiť presné polohovanie napr. ramien žeriavov a montážnych plošín, je použitie absolútnych enkodérov s komunikáciou CANopen. Táto komunikácia je štandardom v automobilovom priemysle, ľahko definuje priority a robí systém mimoriadne stabilným. Tieto enkodéry umožňujú presné meranie polohy, rýchlosti, sklonu a uhla v reálnom čase, čo je dôležité pre spoľahlivé a presné riadenie strojov.

Systém pre spätnú väzbu polohy
Systém spätnej väzby polohy je súbor technológií a zariadení používaných na meranie a riadenie polohy objektu alebo mechanického zariadenia. Tento systém je kľúčovým nástrojom na automatizáciu pracovných procesov v rôznych priemyselných odvetviach. Systém spätnej väzby polohy pozostáva z riadiacej jednotky, snímačov polohy, ktorými môžu byť napr. enkodéry, a akčných členov.
Podobné produkty



Nezáväzný dopyt
alebo dotaz
produktový špecialista

produktový špecialista